
自动驾驶背景
我觉得入门一个领域,不应该是直接针对技术路线埋头苦干
应该要先了解其背景和发展,对整体有个初步的认识
自动驾驶概述
首先我看了一个2小时的自动驾驶概述,大致记录一下,视频链接:https://www.bilibili.com/video/BV137411E7oC?p=1
行业及发展概述
视频前面大概讲了无人驾驶相关的作用以及行业和出行的趋势,讲了无人驾驶探索、发展、成熟的发展历程
对于我这种入门小白还是挺友好的,对于了解背景挺有帮助的
无人驾驶分级
L0-L5(L0-L2人负责,L3-L5车负责)

实现思路
V2X: Vehicle to Everything(车路协同)
边缘计算: 路侧单元(RSU)、车载单元(OBU)
5G通信: LTE-V协议,专门针对车间通讯的协议
路侧智能: 百度ACE计划,由红绿灯等路侧设备感知并将数据发送给无人车
主车智能、感知能力、决策能力、高精地图、定位
权责问题
2017年Mobileye提出RSS(Responsibility-Sensitive Safety)责任敏感安全模型
L4自动驾驶主流系统架构
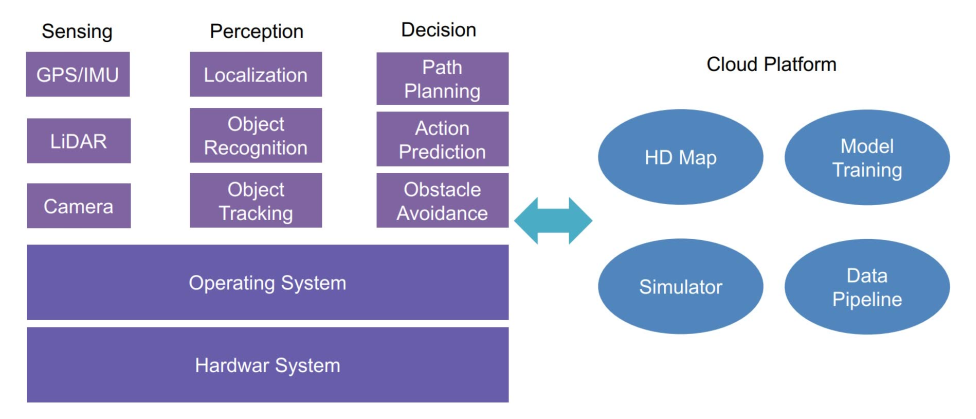
硬件概述
感知传感器:摄像头、激光雷达、毫米波雷达、超声波
定位传感器:IMU、GNSS(无人车一般用RTK(载波相位差分技术))
车载计算单元(IPC)
车辆线控系统

(Lidar和Radar是不一样的。Lidar是我们常说的激光雷达,波长较短,更加精细,采用TOF方式获得距离,常用于建图。Radar是毫米波雷达,在恶劣环境下返回的信息比Lidar准确,成本低。)
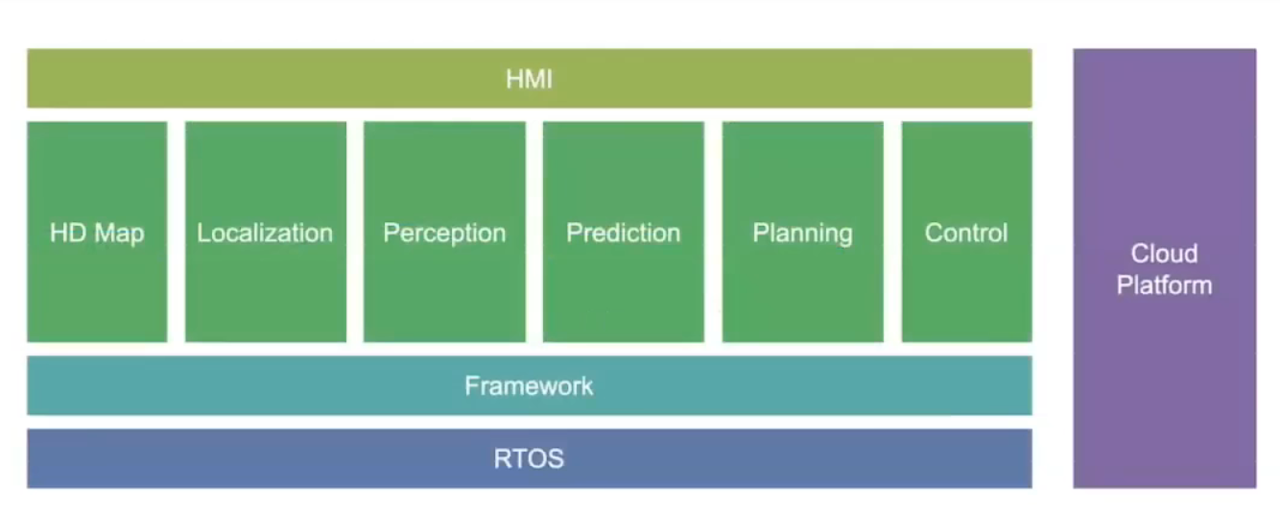
软件概述
RTOS:实时操作系统,比较有名的由QNX(类Unix,强实时)和RT Linux(打实时补丁的Linux)
Framework:框架(中间件),用的比较多的还是ROS,现在的ROS2也解决了ROS的一些问题
HD Map:高精地图
Localization:定位
① INS:惯性导航系统,高频较不准的姿态信息
② RTK:载波相位差分系统,低频较准的位置信息
③几何定位:迭代最近点(ICP)、直方图滤波
卡尔曼滤波融合①②信息,获得准确的实时信息。
Perception:感知(检测、分类、跟踪、分割)
Prediction:预测(实时准确)
Planning:决策规划
Control:控制(准确稳定)
HMI:人机界面(Human Machine Interaction)
Cloud Platform:云端
综述
最后看了两篇综述
Self-Driving Cars: A Survey
Introduction主要讲了三次DARPA对无人驾驶的发展的促进,然后简单介绍一些做无人驾驶的企业和一些无人驾驶平台。然后引出典型的无人驾驶的架构,对架构内各个部分进行了详细的描述。
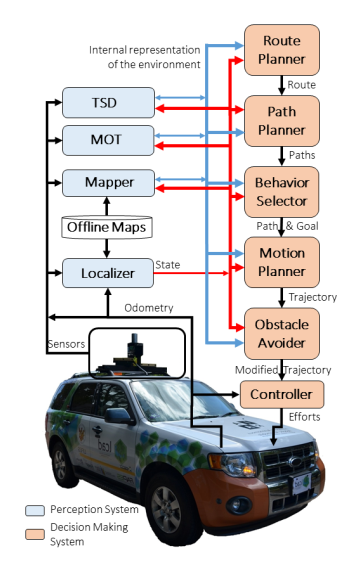
整个架构分为感知系统和决策系统,系统内各个部分的联系如上图所示
感知系统:
Localizer,定位器,负责估计汽车的状态(姿态、速度等),主要有三种方式雷达、雷达+摄像头、摄像头
Offline Maps,离线地图,区分汽车自由(可穿越)空间和障碍空间,常见为OGM,涉及到SLAM
Road Mapper,道路地图,负责管理有关道路和车道的信息,例如地板上的标记和其他形式的交通信号
MOT,Moving Objects Tracker,移动物体跟踪器,检测和跟踪自动驾驶汽车周围环境中移动障碍物的姿态
TSD,Traffic Signalization Detector,交通信号检测器,负责检测和识别交通规则中定义的标志
决策系统:
Route Planner,Route规划器,Route是一系列的点,感觉可以理解为坐标
Path Planner,Path规划器,Path是一系列的姿态,感觉可以理解为向量
Behavior Selector,行为选择器,负责选择当前的驾驶行为
Motion Planner,运动规划器,计算当前状态到目标状态的轨迹,满足运动学和动力学
Obstacle Avoider,障碍物避开器,对运动规划器的轨迹进行避障规划
Controller,控制器,使得汽车能够尽可能好地将轨迹实现。
链接:https://arxiv.org/abs/1901.04407
Computer Vision for Autonomous Vehicles: Problems, Datasets and State of the Art
是一篇近300页的综述,如其名,收集介绍了自动驾驶计算机视觉的一些问题,数据集和先进的方法。
大致列出每一章的内容,方便后续查阅。
第二章:自动驾驶的历史
第三章:传感器(主要讲相机),第一节讲相机模型,包括全向相机和事件相机。第二节讲标定。
第四章:数据集及基准,分别讲了计算机视觉数据集、自动驾驶数据集、使用游戏引擎生成合成数据
第五章:物体检测,主要讲问题定义,方法,数据集,指标,先进方法,讨论。
第六到十一章:物体跟踪、语义分割、实例分割、立体匹配、多视图 3D 重建、光流
第十二章到第十五章:3D 场景流、(映射、定位和自我运动估计)、场景理解、自动驾驶的端到端学习